{kind=link}
ステッピングモーターのプログラムについて
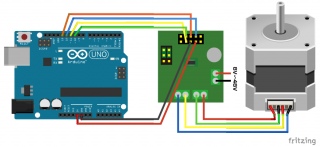
今回の主題、ハイブリッドステッピングモーターのプログラムについて、詳しく勉強してみます。ArduinoからL6470を通してステッピングモーターを制御するには、L6470に制御信号を送るプログラムが必要です。回路は下記のとおりです。
図1 ArduinoとL6470のステッピングモーター回路
図1 ArduinoとL6470のステッピングモーター回路
ステッピングモーターのプログラム動作の流れ
下記がステッピングモーターのプログラムです。第37回、第38回と出てきましたが、このプログラムの流れを紐解いていきます。
Code-Example
#include
#include //(1)SPI通信をするための読み込み
//(2)ステッピングモーター用のピンの定義
#define PIN_SPI_MOSI 11
#define PIN_SPI_MISO 12
#define PIN_SPI_SCK 13
#define PIN_SPI_SS 10
void setup()
{
delay(1000);
Serial.begin(9600);
//(3)ステッピングモーター用のピンの準備
pinMode(PIN_SPI_MOSI, OUTPUT);
pinMode(PIN_SPI_MISO, INPUT);
pinMode(PIN_SPI_SCK, OUTPUT);
pinMode(PIN_SPI_SS, OUTPUT);
digitalWrite(PIN_SPI_SS, HIGH);
//(4)SPI通信の開始宣言
SPI.begin();
SPI.setDataMode(SPI_MODE3);//SCKの立上りでテータを送受信、アイドル時はpinをHIGHに設定
SPI.setBitOrder(MSBFIRST);//MSBから送信
//(5)L6470の利用設定
L6470_setup();
}
//**********************************************
//(6)SPI通信するための関数
//**********************************************
void L6470_send(unsigned char value){
digitalWrite(PIN_SPI_SS, LOW);
SPI.transfer(value); //制御信号をSPI通信で送る
digitalWrite(PIN_SPI_SS, HIGH);
}
//**********************************************
// (7)L6470のセットアップ
//**********************************************
void L6470_setup(){
//デバイス設定
L6470_send(0x00);
L6470_send(0x00);
L6470_send(0x00);
L6470_send(0x00);
L6470_send(0xc0);
//最大回転スピード設定
L6470_send(0x07);//レジスタアドレス
L6470_send(0x20);//値(10bit),デフォルト0x41
//モータ停止中の電圧設定
L6470_send(0x09);//レジスタアドレス
L6470_send(0xFF);//値(8bit),デフォルト0x29
//モータ定速回転時の電圧設定
L6470_send(0x0a);//レジスタアドレス
L6470_send(0xFF);//値(8bit),デフォルト0x29
//加速中の電圧設定
L6470_send(0x0b);//レジスタアドレス
L6470_send(0xFF);//値(8bit),デフォルト0x29
//減速中の電圧設定
L6470_send(0x0c);//レジスタアドレス
L6470_send(0xFF);//値(8bit),デフォルト0x29
//フルステップ,ハーフステップ,1/4,1/8,…,1/128ステップの設定
L6470_send(0x16);//レジスタアドレス
L6470_send(0x00);//値(8bit)
}
//**********************************************
// (8)メイン処理 - loop()
//**********************************************
void loop(){
//360度 - 1回転させる処理
L6470_send(0x50);//Run(DIR,SPD),0x51:正転,0x50:逆転
L6470_send(0x00);
L6470_send(0x20);//回転スピードの設定
L6470_send(0x00);
delay(1604);//1604msで約1回転
L6470_send(0xB8);//急停止(ハードストップ)
}
続きを見る:
図1 ArduinoとL6470のステッピングモーター回路
図1 ArduinoとL6470のステッピングモーター回路
ステッピングモーターのプログラム動作の流れ
下記がステッピングモーターのプログラムです。第37回、第38回と出てきましたが、このプログラムの流れを紐解いていきます。
Code-Example
#include
#include //(1)SPI通信をするための読み込み
//(2)ステッピングモーター用のピンの定義
#define PIN_SPI_MOSI 11
#define PIN_SPI_MISO 12
#define PIN_SPI_SCK 13
#define PIN_SPI_SS 10
void setup()
{
delay(1000);
Serial.begin(9600);
//(3)ステッピングモーター用のピンの準備
pinMode(PIN_SPI_MOSI, OUTPUT);
pinMode(PIN_SPI_MISO, INPUT);
pinMode(PIN_SPI_SCK, OUTPUT);
pinMode(PIN_SPI_SS, OUTPUT);
digitalWrite(PIN_SPI_SS, HIGH);
//(4)SPI通信の開始宣言
SPI.begin();
SPI.setDataMode(SPI_MODE3);//SCKの立上りでテータを送受信、アイドル時はpinをHIGHに設定
SPI.setBitOrder(MSBFIRST);//MSBから送信
//(5)L6470の利用設定
L6470_setup();
}
//**********************************************
//(6)SPI通信するための関数
//**********************************************
void L6470_send(unsigned char value){
digitalWrite(PIN_SPI_SS, LOW);
SPI.transfer(value); //制御信号をSPI通信で送る
digitalWrite(PIN_SPI_SS, HIGH);
}
//**********************************************
// (7)L6470のセットアップ
//**********************************************
void L6470_setup(){
//デバイス設定
L6470_send(0x00);
L6470_send(0x00);
L6470_send(0x00);
L6470_send(0x00);
L6470_send(0xc0);
//最大回転スピード設定
L6470_send(0x07);//レジスタアドレス
L6470_send(0x20);//値(10bit),デフォルト0x41
//モータ停止中の電圧設定
L6470_send(0x09);//レジスタアドレス
L6470_send(0xFF);//値(8bit),デフォルト0x29
//モータ定速回転時の電圧設定
L6470_send(0x0a);//レジスタアドレス
L6470_send(0xFF);//値(8bit),デフォルト0x29
//加速中の電圧設定
L6470_send(0x0b);//レジスタアドレス
L6470_send(0xFF);//値(8bit),デフォルト0x29
//減速中の電圧設定
L6470_send(0x0c);//レジスタアドレス
L6470_send(0xFF);//値(8bit),デフォルト0x29
//フルステップ,ハーフステップ,1/4,1/8,…,1/128ステップの設定
L6470_send(0x16);//レジスタアドレス
L6470_send(0x00);//値(8bit)
}
//**********************************************
// (8)メイン処理 - loop()
//**********************************************
void loop(){
//360度 - 1回転させる処理
L6470_send(0x50);//Run(DIR,SPD),0x51:正転,0x50:逆転
L6470_send(0x00);
L6470_send(0x20);//回転スピードの設定
L6470_send(0x00);
delay(1604);//1604msで約1回転
L6470_send(0xB8);//急停止(ハードストップ)
}
続きを見る:
コメントを書く...
Comments